FREE..!!! Seminar on "Software Development Lifecycle in Automotive domain". Check Careers Page
Understand CAN Protocol, Basics & Types
The CAN protocol, short for Controller Area Network, was initially crafted by Robert Bosch around 1986. A Controller Area Network (CAN) has found its niche as the preferred choice for numerous high-level industrial protocols that adopt CAN as their physical layer, aligning with the ISO-11898:2003 standard. Its exceptional cost-effectiveness, performance, and adaptability make it a versatile solution for system design. What sets the CAN protocol apart is its distinctive broadcast-style bus, which distinguishes it from other communication protocols hence CAN training can be of great help.
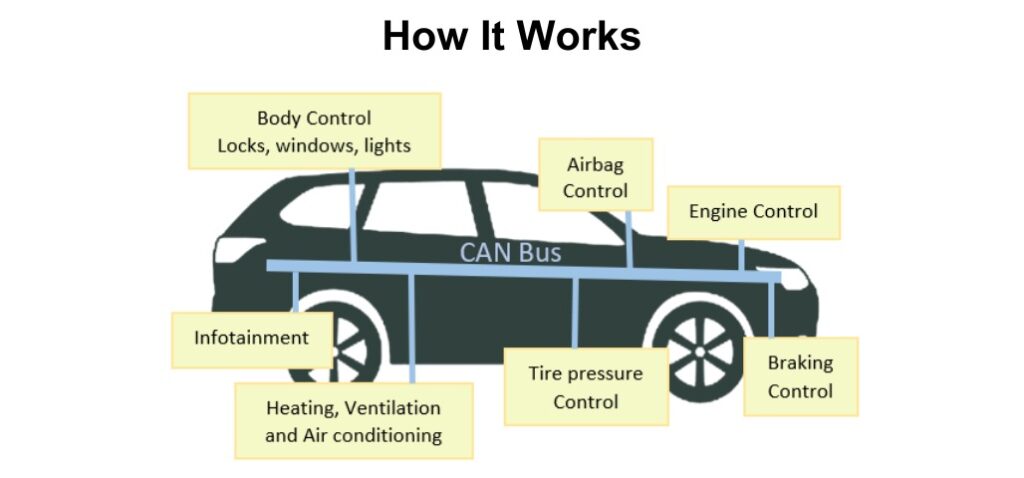
CAN is a serial networking technology initially developed for European cars, but it has expanded its footprint into industrial automotive applications and beyond. It enables real-time communication among various microcontrollers and devices without the necessity of a central computer. CAN serves as a replacement for traditional wiring, simplifying communication between Electronic Control Units (ECUs) in modern automotive systems. Unique identifiers within the protocol convey message urgency and significance, making it a cost-effective and efficient solution for interconnecting numerous ECUs responsible for different subsystems in today’s vehicles, from engine control to advanced driver-assistance systems (ADAS).
Evolution of the CAN Protocol
The evolution of the CAN protocol began in 1983 with Robert Bosch GmbH’s vision to enhance automotive quality, safety, reliability, and fuel efficiency.
In 1986, Bosch introduced the CAN protocol, a significant advancement in automotive communication that simplified the integration of complex electronic devices.
Rapid progress in electronics and semiconductors at the time presented both opportunities and challenges for automotive engineers, who needed to ensure seamless device communication.
CAN’s introduction streamlined the process by enabling various electronic modules to communicate through a shared cable.
This innovation also gave rise to standardized protocols such as CANopen and DeviceNet, contributing to advancements in automotive technology.
Basics of CAN Protocol
The CAN Controller, often referred to as the CAN controller, stands as the central component of the CAN system, playing a pivotal role in ensuring efficient data transmission and reception among the various nodes interconnected through the CAN bus. Its responsibilities encompass message control and scheduling, error detection, and synchronization, ensuring the seamless operation of the CAN network.
The CAN protocol is rooted in a set of fundamental principles that govern its operation:
Arbitration: A key tenet of the CAN protocol, arbitration is the mechanism that resolves conflicts when multiple nodes seek to transmit their data simultaneously. It determines which node gains priority in sending its message over the bus, ensuring orderly communication.
Bit Stuffing: Bit stuffing is a crucial concept that enhances data integrity during transmission. Additional bits are inserted strategically to maintain synchronization and prevent data loss, bolstering the reliability of the CAN network.
Frame Structure: The frame structure outlines the specific format of a CAN message. It encompasses critical elements such as the message identifier, data payload, and control bits, ensuring that messages are correctly interpreted and processed by receiving nodes.
Error Detection: To maintain the integrity of data exchanged on the CAN network, error detection mechanisms like the Cyclic Redundancy Check (CRC) are employed. These mechanisms not only identify errors but also facilitate their correction, reinforcing the robustness of the CAN protocol.
These fundamental principles are at the core of the CAN protocol, providing the foundation for its efficient and reliable operation in a wide range of applications across various industries.
Understanding the mechanisms of the CAN Communication Protocol
In the realm of the CAN communication protocol, the fundamental operation revolves around the CAN device and the transmission of data in packet form, referred to as CAN frames. These CAN frames encompass multiple components, each serving a distinct purpose:
Arbitration ID: Every message destined for the CAN bus is assigned an arbitration ID. The priority of message execution is determined by this ID, with lower arbitration IDs indicating a higher execution priority. In situations where multiple messages are simultaneously transmitted to the CAN bus, the CAN device processes those with lower arbitration IDs before addressing others.
Data Field: The data field represents the format in which data is conveyed to the CAN bus. The CAN protocol accommodates two data field formats: the standard frame format, comprising an 11-bit data length, and the extended frame format, which extends the data length to 29 bits.
Message Components: When a CAN device dispatches a message to the CAN network, the message comprises multiple channels. These channels encompass the data itself and the pertinent information associated with that data. The CAN network subsequently interprets and responds based on this relevant information, optimizing communication and data exchange.
Exploring the Diverse Types of CAN Communication Protocol
CAN communication protocols come in various forms, each tailored to specific needs and scenarios. These types are differentiated by their speed, wiring configurations, and software compatibility:
High-Speed CAN: This CAN variant boasts a transmission rate of up to 1 M bits, making it ideal for high-speed communication applications.
Low-Speed/ Fault Tolerant CAN: With a transmission rate of up to 125 bauds, this CAN type finds its niche in scenarios where fault tolerance and small satellite communication systems are paramount. It is commonly employed in the automotive industry to ensure robust communication even in the presence of faults.
Software Selectable CAN: This CAN type offers versatility with 1 and 2 ports, each adaptable for high-speed, low-speed, or single-wire CAN configurations. Its flexibility suits a range of communication needs.
Single-Wire CAN: Distinguished by its single-wire configuration, this CAN type simplifies connectivity. With a transmission rate of up to 83.3 bauds, it efficiently transmits data and even provides high-voltage pulses to awaken dormant devices, enhancing energy efficiency and overall network performance.
Who Should Take the Course?
The course on CAN protocol is tailored for a broad range of individuals. Those passionate about the automotive industry will find this course to be a valuable asset. With the widespread adoption of automotive CAN protocol and the substantial career growth opportunities it offers, gaining expertise in this protocol is highly advantageous.
Students pursuing degrees in electronics, communication systems, or related fields can gain essential knowledge and practical skills by enrolling in this course. It equips them with the expertise required for future careers in industries that leverage the CAN protocol.
This course serves as an ideal entry point for those embarking on a career in engineering. It covers the fundamentals of CAN protocol and equips aspiring engineers with the knowledge necessary for job interviews in the field.
By enrolling in this course, participants will receive comprehensive insights into CAN protocol, practical experience with low-cost CAN bus analyzers, and a thorough understanding of interview-related questions for entry-level engineering positions, ensuring they are well-prepared for their professional journey.
Why is a Certification Mandatorty
Certification in the realm of the CAN protocol is paramount due to its pervasive use across diverse domains such as automotive, industrial automation, building automation, aerospace, and marine. This two-wire serial bus communication protocol, distinguished by its robust error detection and stringent security measures, plays a pivotal role in ensuring reliable data exchange. Its ability to support multi-master communication renders it indispensable in countless applications. With comprehensive CAN training, one can understand its potential while addressing different challenges across various sectors.
Prerequisites
Ideal for entry-level embedded developers seeking to enhance their expertise and skills.
This is a valuable introductory course for those aspiring to specialize in the automotive industry.
It can help students gain the foundational knowledge necessary to excel in automotive careers. By meeting these prerequisites, individuals can fully engage with the course materials and benefit from the comprehensive understanding of the CAN protocol it provides, thereby enhancing their career prospects in the automotive domain and related industries.
The Controller Area Network (CAN) is a robust and versatile serial communication bus widely applied in automotive and industrial settings. Its resilience to noise, priority arbitration, and diverse applications make it invaluable for embedded systems.
VAct Technologies offers both online and offline CAN training courses, catering to students interested in mastering the fundamentals of CAN protocol, its architecture, applications in various domains, different frame types, message filtering mechanisms, and providing hands-on experience with a CAN analyzer demo. CAN protocol training by Vact Technologies can enrich your embedded knowledge and enhance your design projects.