Controller Area Network (CAN)

Controller Area Network (CAN) protocol was initially created by BOSCH in the mid-1980s for automotive applications as a method for enabling robust serial communication. CAN is an asynchronous Serial communication protocol.
More About Raspberry Pi
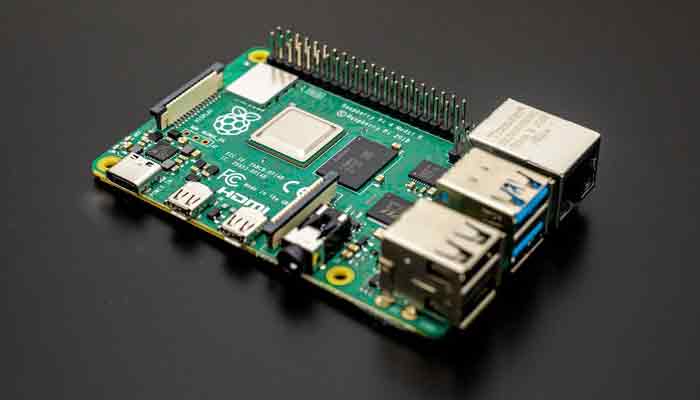
More About Raspberry Pi Raspberry Pi Raspberry Pi is normally called as small personal computer or mini-computer and this single board itself acts as a computer. USB Keyboard, USB Mouse and Monitor are connected as external devices to the Raspberry pi which will act as a Mini Pocket-sized personal computer. Below images shows Raspberry pi […]
More About Embedded Systems
Embedded System is a dedicated system which is used to perform the specific task by the combination of computer hardware and software designed for a specific function. Embedded systems may also function within a larger system.